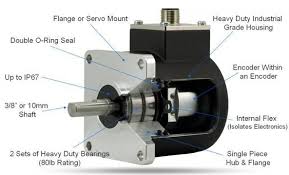
El encoder es un dispositivo electromecánico que permite codificar el movimiento mecánico en distintos tipos de impulsos eléctricos: digitales binarios, analógicos en función de una onda, pulsos, etcétera. De este modo, un encoder es una interfaz entre un dispositivo mecánico móvil y un controlador.
Encoder: principios de medición
Existen dos grandes tipos de encoder o generador de pulsos: los lineales y los rotatorios; en cada grupo a su vez hay distintos tipos de codificación (absolutos e incrementales) y principios electromecánicos de funcionamiento que veremos a continuación.
Sensor magnético
En estos sensores se utiliza una cinta magnetizada o bien una fabricada con un material de reluctancia magnética variable; la posición se determina mediante cabezales de lectura magneto-resistivos o con solenoides.

El principal problema con estos sensores es que, como se puede deducir fácilmente, son susceptibles a los campos magnéticos intensos, por lo que no son recomendables en entornos en donde existen fuerzas electromotrices elevadas, como transformadores de alta tensión o grandes motores en las cercanías.
Como ventaja, son muy confiables en la lectura, y relativamente económicos. Pueden lograr resoluciones del orden de los micrómetros.
Sensor óptico
Estos encoders trabajan por un principio más sencillo que el magnético: un sensor óptico registra los cambios en una cinta, que pueden estar codificados en patrones Moiré, holográficos u otros.

La principal ventaja de este tipo de encoder es la gran precisión que permiten alcanzar, del orden de décimas de micrón. Otra gran ventaja es que permite operar sin necesidad de contacto físico entre las partes, por lo que es apropiado para aplicaciones en las que el rozamiento debe evitarse.
Por otro lado, la principal desventaja es su gran susceptibilidad a la suciedad en forma de partículas, por lo que es necesario asegurar la hermeticidad del conjunto.
Sensor capacitivo
Encoder rotativo capacitivo
Este sensor opera midiendo la capacitancia entre la escala y el cabezal lector. Debido a que la lectura se realiza sin contacto físico, se utiliza principalmente en aplicaciones de medición: calibres, diales, etcétera.

Su desventaja es que es susceptible a la presencia de suciedad en el cabezal lector o en la escala, por lo que debe procurarse su cierre hermético para una operación sin errores.
Sensor inductivo
Esta tecnología es la más robusta, y permite su uso en ambientes en donde es imposible aislar el instrumento de contaminantes tales como líquidos refrigerantes o partículas.

Como contrapartida podemos decir que la precisión no es tan elevada como en las otras opciones.
Sensor de corrientes de Eddy
Este modelo —patentado— consta de una escala en la que se intercalan materiales no magnéticos de alta y baja susceptibilidad, que permiten la detección mediante el análisis de la variación en la inductancia dentro de un circuito de corriente alterna.
Este tipo de codificador se utiliza mayormente en encoders rotativos.
Encoders lineales y rotatorios
Más allá de la tecnología utilizada para realizar la medición en sí misma, podemos diferenciar estos instrumentos de acuerdo al tipo de movimiento que permiten: un movimiento lineal o uno rotativo co respecto a un eje.
Encoder lineal
Es el tipo más sencillo de encoder o generador de pulsos; un ejemplo claro de su existencia se da en los calibres digitales, en donde la medida se muestra en un display digital: detrás de la pieza móvil (corredera) hay un encoder capacitivo que se encarga de leer, por interpolación, la distancia recorrida desde el cero.

Básicamente un encoder lineal se compone de un módulo fijo y otro móvil (el que se une a las partes móviles de la máquina con la cual se hará la interfaz). El módulo fijo contiene el sensor y la electrónica necesarias para detectar y medir el movimiento, y convertirlo en impulsos eléctricos inteligibles por otro circuito digital o analógico.
El módulo de lectura puede utilizar distintas tecnologías para medir la posición de la barra móvil.
Encoder rotatorio
Encoder rotatorio óptico
En estos dispositivos la lectura se realiza sobre un disco, en cuya cara se encuentra la codificación que permite discernir la posición angular —que, como veremos más adelante, puede ser relativa o absoluta— con gran precisión.
Los usos más comunes se dan en los controles de máquinas industriales tales como los husillos de tornos y fresadoras CNC, brazos robóticos, controles de instrumentos electrónicos (diales) y hasta es posible verlos todavía en los viejos ratones de computadoras o en algunos trackballs.
Encoders incrementales y absolutos
La forma en que el encoder —indistintamente de si es lineal o rotatorio— detecta el movimiento permitirá establecer la posición en forma relativa o absoluta.
Detección incremental
Este tipo de encoder detecta el movimiento —y la distancia recorrida en ese movimiento— gracias a la detección diferencial de dos valores codificados en la superficie detectable.
La ventaja de este sistema es que es más económico que el encoder absoluto, y que permite mantener la misma precisión independientemente de la longitud de la pieza móvil; como desventaja debemos señalar que, para inicializarse, el sistema necesita posicionar el encoder en un cero predeterminado.
Detección absoluta
En este caso la codificación sobre la superficie de la pieza móvil incluye la posición real desde el punto cero de la escala; de este modo, es posible que el instrumento conozca su posición sin necesidad de moverlo. Esto es algo particularmente útil cuando por algún motivo la máquina —a la cual le ofrece interfaz— se reinicia.

La desventaja es que se requieren más pistas de codificación para incluir la información de posición; algo que, a medida que se requiere más longitud con la misma precisión, encarece más la electrónica necesaria.
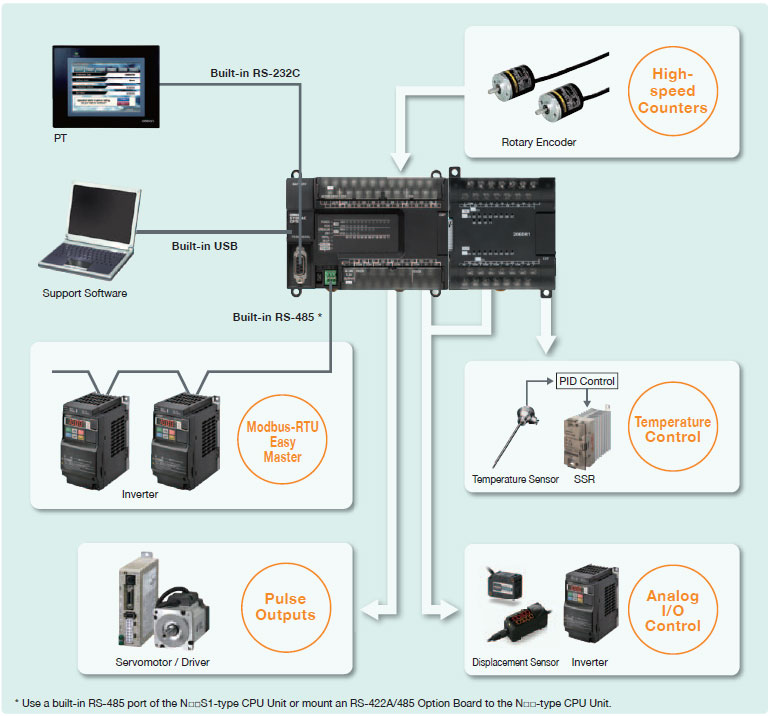
Ejemplo 1 de Conexión
El ejemplo muestra como programar y operar con una encoder incremental utilizando una carta de contaje NX-EC0122 en una cabecera EtherCAT controlada por un controlador Omron NJ utilizando el software de programación Sysmac Studio
CONFIGURACION
Lo primero es crear en la red EtherCAT una cabecera NX-ECC203

Luego añadimos la carta NX-EC0122 pra encoder incrementales, por defecto se nos asignas una serie de canales de E/S donde podemos leer y escribir datos de esta carta, personalmente echo de menos el tener habilitado por defecto los siguiente canales:
Encoder Counter Operation Command – Es el canal de control que nos va a permitir operar sobre la carta para poder habilitar el contaje, hacer un reset etc
Preset Command Value Counter – Es el canal donde introduciremos el valor que queremos que tome el encoder, muy útil para reescribir el valor que tenía el encoder antes de quitar tensión (el valor de contaje se pone a cero) o si queremos cambair en cualquier momento el valor de contaje

Para poder añadir funciones de la carta pulsamos sobre «Editar ajustes de asignación de E/S» . Nos aparece una pantalla donde podemos añadir otro canales.

Pulsando sobre «Añadir entrada de E/S» nos aparece la siguiente pantalla con las diferentes opciones que podemos añadir, en nuestro caso seleccionamos las 2 que aparecen y pulsamos «Aceptar»

Con esto hemos añadido los dos canales correspondientes a Encoder Counter Operation Command y Preset Command Value Counter

DIRECCIONAMIENTO
Una vez configurada la red EtherCAT y la carta NX-EC0122 vamos al apartado de «Mapa E/S» donde nos aparecerán todos los canales que hemos configurado en la carta.

Asignamos nombre a las variables, en nuestro caso solo las que vamos a utilizar:
– Encoder Counter Status : Valor actual de contaje del encoder
– Counter Enable : Bit que habilita el contaje del encoder
– Internal Reset Execution : Bit de reset (puesta a cero) del contador del encoder
– Preset Execution : Bit de Preset (cambia el valor actual de encoder por el de (Preset Command Value)
– Preset Command Value Counter : Es el valor que tomara el encoder al activar el bit Preset Execution

CABLEADO
Ahora que tenemos configurado todo tenem0s que tener claro el esquema de conexión de la carta, En encoder incremental se cablea de la siguiente manera

PROGRAMACION
Configurado y cableado ya podemos utilizar en el programa nuestro encoder
Con estas pocas lineas podemos trabajar:
Restablecer e valor de contaje
El valor del contador del encoder se pone a cero cuando quitamos tensión, si queremos restablecerlo al valro que esta antes de quitar tensión podemos hacerlo así
Linea 0 – Siempre que estemos en marcha movemos el valor del encoder «Enc1_PV» al canal retentivo «Enc1_PV_Save»
Linea 1 – Siempre canal retentivo «Enc1_PV_Save» al canal «Enc1_Preset_Val»
Linea 2 – Conel primer ciclo de SCAN activamos el bit «Enc1_Preset» que hace que el valor actual del encoder tome el valor de «Enc1_Preset_Val»
Habilitar el contaje
Linea 3 – Sencillo, si activamos el bit «Enc1_Hab» la carta contará los pulsos del encoder
Reset valor de contaje
Linea 4 – Si activamos el bit «Enc1_Rset» el valor de contaje se pone a cero, en nuestro caso es un detector inductivo de paso por cero el que da la orden

Con estos paso ya puede empezar a utilizar tu encoder con el controlador NJ de Omron
Parte 1
Learn , Conceptos Básico de Cálculos Eléctricos for Beguinners
DIFERENCIA DE POTENCIAL (d.d.p.): Es la diferencia de potencial eléctrico entre dos cuerpos. También se le llama TENSIÓN o VOLTAJE.
Su unidad es el VOLTIO (V).
LEARN CONCEPTOS BÁSICOS de TRANSMISIÓN de MOVIMIENTO con ENGRANAJES for BEGUINNERS Parte 1
Engranajes:
son mecanismos formados por varias ruedas dentadas unidas. No necesitan correa de transmisión.
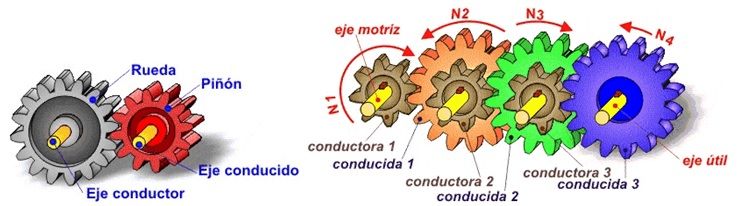
El de la derecha será un engranaje simple y el de la izquierda un tren de engranajes.
El significado de automatización hace referencia a los trabajos realizados por un operario humano y que en la Industria 4.0 pasan a ser automátizados y sustituidos por una máquina automática, un software informático o por un robot.

PLC Los PLC (Controlador lógico programable) o autómatas programables son dispositivos electrónicos que permiten programar una lógica para controlar todo tipo de máquinas y procesos industriales.

TIA Portal es un software que integra todos los componentes de las máquinas para controlar procedimientos y operaciones. Al ser una aplicación es modular, es posible añadir nuevas funcionalidades que se adapten a las necesidades de la aplicación.
Es ideal para hardware que utilizan el S7-1200 y S7-1500. Es una realidad que los nuevos paneles funcionan mejor con este programa. Además, se obtiene una fácil migración de los proyectos con sistemas ya existentes.

M a s . . .

El entorno de desarrollo integrado Sysmac Studio le permite aumentar su productividad, ya que se trata del primer entorno de desarrollo integrado (IDE) del sector que integra lógica, motion, robótica, HMI, visión, detección, seguridad y simulación en 3D en una única plataforma. M a s . . .
PYTHON Es un lenguaje de programación interpretado cuya filosofía hace hincapié en una sintaxis que favorezca un código legible. Y define este como un lenguaje multiparadigma, debido a que soporta orientación a objetos, programación imperativa y en menor medida programación funcional. Es interpretado de tipado dinámico y multiplataforma.

Herramientas antichispa para trabajo en zonas
clasificadas ATEX / EX
Existen dos vertientes de normativa relacionadas. La que afecta a los equipos empleados en zonas ATEX y la que afecta a la determinación de zonas ATEX en las zonas de trabajo.
Analizaremos primero nuestra perspectiva, la del fabricante y distribuidor. Para la fabricación y distribución de equipos ATEX aplica la Directiva de productos ATEX 2014/34/EU. Esta Directiva europea es posteriormente traspuesta a la normativa local de cada país miembro dentro de la UE.

AGV Los robots móviles AGV han sido especialmente diseñados para mejorar el rendimiento de los procesos en el transporte y distribución de materiales en las fábricas y almacenes, y pueden trabajar tanto en interiores como en exteriores.

ROBOTIC La robótica industrial y la automatización son los pilares que han hecho posible la consolidación de la Industria 4.0, además de traer consigo numerosos beneficios para la productividad y eficiencia de los recursos de producción.

M a s . . .
Hidráulica Los grupos hidráulicos, en hidromecánica, son conjuntos de componentes hidráulicos que permiten alimentar una red o sistema hidráulico con aceite y a un caudal determinado.
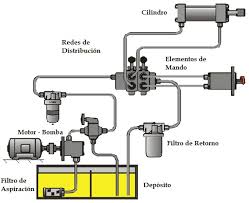
Se puede definir la neumática, como el conjunto de tecnologías que usan un gas como medio para transmitir energía.
El proceso es sencillo y a la vez tiene una cierta complicación debido a los elementos requeridos para su aplicación. En el proceso se aprovecha la capacidad de compresión de los gases para acumular energía, al aumentar la presión de los mismos en el interior de recipientes o circuitos.

M a s . . .
Software de programación GX Developer FX
El potente software basado en Windows™ es sencillo y fácil de instalar en PC y admite los PLC serie FX de Mitsubishi. El software es fácil de usar con una interfaz intuitiva y una curva de aprendizaje corta. Permite programar sus propios bloques de funciones y tiene una amplia gama de utilidades disponibles para configuración. También puede probar todas las funciones clave de sus programas antes de aplicarlas con el modo de simulador de fuera de línea GX.
TIA PORTAL ,Parte 2 , Lenguaje Estructurado SCL _1
SCL es un lenguaje de texto estructurado cuya sintaxis es similar a otros lenguajes de alto nivel y propósito general como el Pascal o el C , además , es un leguaje de control basado en texto ,se utiliza para la ejecución de cálculos complejos , algoritmos y operaciones con datos .

Se corresponde con la norma IEC 61101-3(ST)
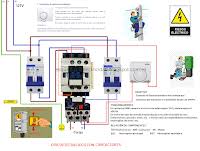
Un plano eléctrico es la representación de los diferentes circuitos que componen y definen las características de una instalación eléctrica y donde se detallan las particularidades de los materiales y dispositivos existentes.
La instalación eléctrica se puede representar sobre uno o varios planos diferentes.
Para representar estos planos pueden utilizarse diferentes tipos de esquemas eléctricos normalizados y estandarizados, entendiendo como esquema eléctrico el conjunto de conexiones y relaciones eléctricas coherentes mediante símbolos de los componentes de un sistema eléctrico.
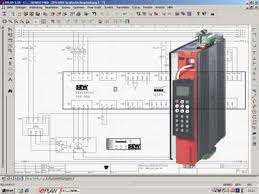
EPLAN Electric P8 es un sistema de ingeniería consistente, integrado y rápido que se utiliza para planificar y diseñar la ingeniería eléctrica de máquinas y sistemas de planta.
El software es compatible con una amplia variedad de métodos de ingeniería: desde la creación manual hasta una planificación estandarizada basada en plantillas.
Evitar explosiones eficazmente: introducción a la
protección ATEX
Existen dos vertientes de normativa relacionadas. La que afecta a los equipos empleados en zonas ATEX y la que afecta a la determinación de zonas ATEX en las zonas de trabajo.
Analizaremos primero nuestra perspectiva, la del fabricante y distribuidor. Para la fabricación y distribución de equipos ATEX aplica la Directiva de productos ATEX 2014/34/EU. Esta Directiva europea es posteriormente traspuesta a la normativa local de cada país miembro dentro de la UE.
VISIÓN ESTRATEGICA ENERGÉTICA
- En el corto plazo, el nuevo plan estratégico 2021-2023 aumenta las inversiones un 25% hasta 7.900 millones para acelerar la descarbonización y la digitalización.

VISIÓN ARTIFICIAL
La visión artificial ayuda a resolver tareas industriales completas en forma confiable y consistente

ENERGY EFFICIENCY IN INDUSTRY
La industria, sector intensivo en el consumo de energía, ha sido uno de los sectores en el que más han incidido las actuaciones orientadas a mejorar la eficiencia energética.
TECNOLOGÍAS
El concepto de tecnología puede ser bastante amplio, ya que ha estado presente en la humanidad desde la invención de utensilios, herramientas y técnicas.

Meet Crossrail’s giant tunnelling machines
Crossrail Project
Crossrail will use eight tunnel boring machines (TBMs) to construct the new tunnels under London. These huge machines will work 24 hours a day beneath the streets of London, excavating large volumes of ground and erecting the concrete tunnel lining. Each machine has a rotating cutter head at the front, and a series of trailers behind, housing all the mechanical and electrical equipment required for the excavation of material.

Python desde cero
LESSON TWO
Variables en Python
Las variables son uno de los dos componentes básicos de cualquier programa.
En su esencia, un programa está compuesto por datos e instrucciones que manipulan esos datos. Normalmente, los datos se almacenan en memoria (memoria RAM) para que podamos acceder a ellos.
Entonces, ¿qué es una variable? Una variable es una forma de identificar, de forma sencilla, un dato que se encuentra almacenado en la memoria del ordenador. Imagina que una variable es un contenedor en el que se almacena un dato, el cuál, puede cambiar durante el flujo del programa. Una variable nos permite acceder fácilmente a dicho dato para ser manipulado y transformado.

LA EFICIENCIA ENERGÉTICA puede significar la
diferencia entre rentabilidad y pérdidas económicas.
Producción más limpia :
Se utiliza para acelerar la aplicación de estrategias ambientales preventivas a procesos, productos y servicios, para aumentar la eficiencia y reducir los riesgos para los seres humanos y el medio ambiente.
Aborda,
a) Eficiencia productiva: optimización del uso productivo de los recursos naturales (materiales, energía y agua);

AUTOMATIZACIÓN Y LA EFICIENCIA ENERGÉTICA ,
es la diferencia entre ahorro y perdidas económicas.
Los conceptos de automatización eficaces están basados en componentes multifuncionales sin las limitaciones de rendimiento causadas por los procesadores, la memoria o la tecnología de la comunicación.
Algunos conceptos como el funcionamiento determinístico en multitarea, tiempos de reacción mínimos o un concepto de software completo son elementos básicos en el ahorro de energía en los servo-accionamientos.

APRENDER PROGRAMACIÓN con PYTHON , DATOS
BÁSICOS DE PYTHON , PARA PRINCIPIANTES , Parte 3
Los tipos de datos
En cualquier lenguaje de programación de alto nivel se manejan tipos de datos. Los tipos de datos definen un conjunto de valores que tienen una serie de características y propiedades determinadas.
En Python, todo valor que pueda ser asignado a una variable tiene asociado un tipo de dato.
En Python todo es un objeto. Así que los tipos de datos serían las propiedades y las variables serían las instancias (objetos) de los tipos de datos.
