KUKA WorkVisual 4.0
La Ingeniería KUKA.WorkVisual le permite trabajar de manera más eficiente en la automatización durante todo el ciclo de vida del software.
Parte 1
KUKA.WorkVisual: intuitivo desde la configuración hasta el diagnóstico
Ya sea configuración, programación, puesta en marcha o diagnóstico: KUKA. WorkVisual proporciona un entorno homogéneo de desarrollo fuera de línea, diagnóstico en línea y mantenimiento para cada paso.
Los catálogos y los datos de proyectos independientes del programa garantizan la coherencia y la integración perfecta.
Herramienta con una interfaz y un manejo de menú uniformes.
Si se usan funciones, se comprueba la lógica del código de programa de KUKA.WorkVisual en segundo plano. Este sistema evita los problemas de raíz, las secuencias de proyecto se ejecutan de forma más racional y constante.
Las interacciones se visualizan mediante herramientas visuales para que se puedan detectar de forma intuitiva y manejar de forma más sencilla.
Adaptación perfecta a los controles selectivos de la KR C4
En KUKA.WorkVisual se pueden predeterminar directamente la configuración E/S, la conmutación, las cinemáticas ajenas, los Roboteams y Save-Robot 3.0 en función del control de robot, el control PLC, el Motion Control y el Safety Control.
Así ya se pueden añadir y eliminar posibles conflictos de forma offline. Este sistema reduce el tiempo de puesta en servicio sin aumentar los riesgos.
Mayor consistencia a lo largo de todo el ciclo de vida del software
La Ingeniería de KUKA.WorkVisual se puede usar para la configuración de células, como entorno de programación universal y como Shop Floor Unit.
Cubre todos los ámbitos en el ciclo de vida de un programa y, gracias a WorkVisual Roundload, se obtiene una homogeneidad perfecta entre los mundos online y offline.
En la arquitectura de software modular de KUKA.WorkVisual, los editores y componentes infraestructurales acceden a servicios comunes como bancos de datos de proyecto, catálogos o servicios online.
Además de las herramientas básicas como VisualProject, VisualConfig, VisualKRL y VisualAssistance, esta plataforma ofrece la posibilidad de adaptar más módulos, Multiprog y otros.
Ventajas de KUKA Work.Visual
- Interfaz de usuario uniforme orientada a estándares
- Registro consistente de datos de proyecto, prevención de entradas múltiples erróneas
- Administración de red de todos los controles KR C4
- Amplias posibilidades de diagnóstico
- Configuración integrada y uniforme de módulos E/S de bus de campo y circuitos, así como diagnóstico a Robot Control y SoftPLC y entre ellos
- Buses de campo compatibles PROFINET, PROFIBUS, EtherCAT, EtherNet/IP, DeviceNet y VARANBUS
- Configuración Drag & Drop y parametrización guiada por menú para RoboTeam ProfiSafe, CIP/Safety y FSoE
- Editores para programación textual de componentes de célula
- Permite la edición cómoda e independiente de proyectos de programas de control directamente en el entorno de ingeniería.
Ejemplo de Uso
PIMER PROYECTO
1.- En Archivo le damos a Abrir Proyecto.


2.- En esta ventana Explorador de Proyecto WorkVisual , tenemos cuatro opciones, de los cuales elegiremos Crear Proyecto.

3.- Una vez elegido el modelo para el nuevo proyecto aceptamos con haciendo clic en Nuevo.
nos aparecerá de la siguiente forma.

4.- Haciendo clic dos veces en la unidad de control , nos aparece una ventana con la versión de la Unidad de control

5.- En esta ventana Activamos la versión haciendo clic en OK y nos aparecerá la siguiente ventana

6.- Cerramos la ventana de Circuito EA

7.- Y podremos ver nuestra Unidad de Control

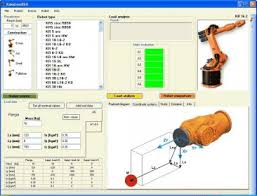
8.- Entraremos en la ventana de Catálogos -> en la subcarpeta KukaRobots -> Carpeta KR AGILUS sixx , escogeremos el Robot y lo arrastraremos hacia la Unidad de Control.

Nos aparecerá una ventana de Análisis de Proyecto de WorkVisual

En ella haremos clic en Abrir el diálogo de propuesta de componentes
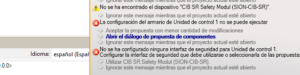
Y nos aparecerá el Ejemplo de Configuración

Confirmaremos haciendo clic en Afectar

Guardamos el Proyecto en Archivo

En Guardamos Como colocamos el nombre al Proyecto y clic en Guardar

Pasamos el Proyecto a la Unidad de Control

Descarga el software:
KUKA.WorkVisual (incluidos tutoriales en vídeo)
Parte 1