COMUNICACIONES INDUSTRIALES , COMUNICACIONES ETHERCAT Parte 1

¿EtherCAT, que es?
- • EtherCAT (Ethernet for Control Automation Technology )
• EtherCAT es un bus abierto basado en Ethernet fieldbus estándar, utilizando IEEE 802.3 (Ethernet Standard) componentes.
• El esclavo EtherCAT incorpora hardware EtherCAT dedicado, que puede ser un chip especial o por IP.
• El cableado es Ethernet Industrial estándar en términos de robustez mecánica y estabilidad electromecánica.

- • EthernetIP: Es un protocolo de Ethernet Industrial para controladores de alto rango, PLC, Scadas y redes IT.
• EtherCAT: Es un protocolo de Ethernet Industrial para “datos pequeños” pero de tiempo real. Por ejemplo: servos, drives e IO’s.
- • EthernetIP: Es un protocolo de Ethernet Industrial para controladores de alto rango, PLC, Scadas y redes IT.
• EtherCAT: Es un protocolo de Ethernet Industrial para “datos pequeños” pero de tiempo real. Por ejemplo: servos, drives e IO’s. - • 100 BASE-TX: – La capa física más implantada. – Par trenzado apantallado(STP) con 2 pares de hilos.

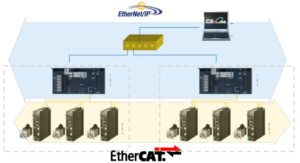
- • Algunos fabricantes usan EtherCAT como bus principal. Se permiten distintos tipos de topología: bus, Estrella, árbol, anillo, etc
- • EtherCAT en la arquitectura de OMRON y se posiciona como un bus a tiempo real de Motion e I/O, y en este momento es tipo bus y también soporta anillo.
EtherCAT principio de funcionamiento
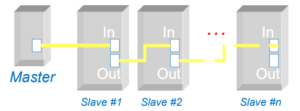
- • El dato se mueve a través del cable y los dispositivos a una velocidad de 100Mbps.
• El esquema actual es una estructura en línea.
• Cada dispositivo recibe el mensaje. Pero no lo reenvia, el mensaje atraviesa el dispositivo.
• Entonces recoge el dato que va dirigido a él e inserta la respuesta. “Lo hace al vuelo». • El final del mensaje esta entrando y la primera parte del mismo ya lo ha abandonado.
EtherCAT es Ethernet Industrial
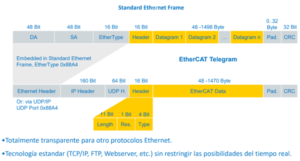
- • EtherCAT usa tramas Ethernet estándar: IEEE 802.3.
• El telegrama EtherCAT es enviado en la sección de Datos Ethernet dentro de la trama.
• El telegrama EtherCAT consiste es 1 a n Datagramas Ethercat.
• Los datagramas pueden ser fragmentados en diferentes telegramas.
Ethernet Estándar, aproximación

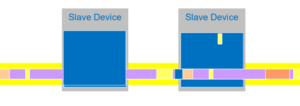
- • En la mayoría de los protocolos Ethernet usan mecanismo tipo polling.
• El maestro y cada esclavo intercambian datos en buses amarillos individuales aunque se utilicen unos pocos bits
• El uso del ancho de banda no es eficiente.
Uso eficiente del ancho de banda de EtherCat

- • EtherCAT transporte muchas tramas de los esclavos en el mismo bus amarillo y no envía más buses
• Por que gastar un telegrama de 1470 bytes para cada esclavo cuando la mayoría de las veces solo necesitamos unos cuantos bits?

EtherCAT Datagrama

- • Un paquete EtherCAT puede contener muchos datagramas. Cada datagrama es utilizado por dispositivos que han sido programados para usarlos.
• Los equipos usan los datos de su datagrama con un cierto offset.
• El orden del datagrama y la frecuencia de envió del maestro se asignan en el configurador.
• Por lo que un datagrama se puede enviar cada ciclo y otro cada cinco ciclos.
• Esta optimización de la estructura del telegrama da un rendimiento óptimo para las I/O comparado con los protocolos de polling.
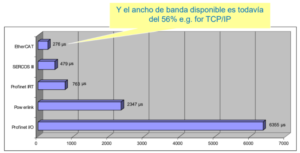
El resultado…
- • 40 ejes (con 20 bytes entrada + 20 bytes salida)
• 50 estaciones remotas con un total de 560 EtherCAT Bus
• 2000 Digitales + 200 Analogicas I/O, Bus de 500 m
• Rendimiento EtherCAT: Tiempo ciclo= 276 μs con un 44 % carga de Bus, longitud del telegrama= 122 μs
Producto EtherCAT
• Gama SYSMAC

• PLC Maestra CJ1 y CJ2

• Motion: servos altas prestaciones

• Motion: variadores MX2 y RX

• Periferia de E/S

• Sistemas de Visión:

• Seguridad Industrial:
