SOFTWARE DE DISEÑO DE PCB
Software de diseño de PCB para poner en práctica el nuevo proyecto electrónico que acaba de diseñar. Por lo tanto, tienes las mejores herramientas de software de PCB disponibles que le ayudarán a desarrollar su placa de circuito impreso más rápido y con facilidad.
PCBWeb Designer es una aplicación CAD gratuita para diseñar y fabricar hardware electrónico. Diseñe esquemas de varias hojas con la herramienta de cableado rápida y fácil de usar. Enrute placas multicapa con soporte para vertidos de cobre y verificación DRC. Catálogo de piezas de Digi-Key integrado con administrador de lista de materiales.

ZenitPCB Es una excelente herramienta de software de diseño de diseño de PCB para crear placas de circuito impreso (PCB) profesionales. Es un programa CAD flexible y fácil de usar, que le permite realizar sus proyectos en poco tiempo. Con ZenitPCB Layout es posible crear el proyecto partiendo tanto de la captura del esquema como del propio layout.

TinyCAD Es un programa que le ayuda a dibujar diagramas de circuitos. Viene completo con bibliotecas de símbolos para que pueda comenzar de inmediato. Además de poder simplemente imprimir sus diseños, puede usar TinyCAD para publicar sus dibujos copiando y pegando en un documento de Word o guardándolos como un mapa de bits PNG para la web.

PCB de Osmond Es una herramienta flexible para diseñar placas de circuito impreso. Funciona en Macintosh. Entre sus muchas características se incluyen: tamaños de placa prácticamente ilimitados, número de capas de placa, número de piezas, soporte para piezas de montaje en superficie y orificios pasantes y más.

BSch3V Es un programa de captura de esquemas para Windows. El nombre «BSch» es una abreviatura de «Esquema básico». Tiene solo funciones básicas, con el fin de simplificar la operación.

ExpressPCB Es muy fácil de aprender y usar. El diseño de PCB es fácil, incluso para el usuario por primera vez.

Kicad Es un software de código abierto (GPL) para la creación de diagramas esquemáticos electrónicos e ilustraciones de placas de circuito impreso. Es útil para todos los que trabajan en diseño electrónico (diagramas esquemáticos y tablero impreso hasta 16 capas).

gEDA Se ejecuta en Linux y ha producido herramientas que se utilizan para el diseño de circuitos eléctricos, captura de esquemas, simulación, creación de prototipos y producción. Actualmente, el proyecto gEDA ofrece un conjunto maduro de aplicaciones de software gratuitas para el diseño de electrónica, que incluyen captura de esquemas, gestión de atributos, generación de listas de materiales (BOM), listas de redes en más de 20 formatos de listas de redes, simulación analógica y digital y placa de circuito impreso (PCB ) patrón de diseñó.

Fritzing El software Fritzing es una interesante iniciativa de código abierto para ayudar a diseñadores, artistas, investigadores y aficionados a trabajar creativamente con electrónica interactiva y desarrollar proyectos electrónicos. Fritzing te ayuda a aprender más sobre circuitos electrónicos, a documentar tus proyectos e incluso te permite prepararlos para la producción.

DesignSpark PCB es el software de diseño de electrónica más accesible del mundo. Fácil de aprender y fácil de usar, está diseñado para reducir significativamente el tiempo entre el concepto y la producción. En el núcleo de este enfoque único se encuentra un potente motor de software que le permite capturar esquemas, diseñar placas y diseños de PCB.

EasyEDA es un conjunto de herramientas EDA gratuito, de instalación cero, basado en la web y en la nube, que integra una potente captura de esquemas, simulación de circuitos de modo mixto y diseño de PCB en un entorno de navegador multiplataforma sin problemas, para ingenieros electrónicos, educadores, estudiantes y aficionados.































Proyecto de robot seguidor de línea ATmega8 (LFR)
La robótica es la rama de la tecnología que se ocupa del diseño, construcción, operación y aplicación de robots, así como de sistemas informáticos para su control, retroalimentación sensorial y procesamiento de información. La palabra robótica proviene de Runaround, un cuento publicado en 1942 por Isaac Asimov. El robot es una máquina electromecánica que está guiada por un programa de computadora o un circuito electrónico.
Un sistema de robot contiene sensores, sistemas de control, manipuladores, fuentes de alimentación y software que trabajan juntos para realizar una tarea asignada. Uno de los robots autónomos más básicos que puede construir es un robot de seguimiento de línea (LFR). El propósito de este tutorial de AVR, parte 23, es ayudarlo a construir un robot de seguimiento de línea utilizando un chip AVR de bajo costo, que puede seguir una ruta arbitraria.
LFR-Resumen
Nuestro LFR es un robot seguidor de línea bastante bueno, consta de piezas electromecánicas de bajo precio, componentes electrónicos y un circuito de procesador basado en un chip microcontrolador. Los básicos básicos se enumeran a continuación:
- Chasis de robot
- Motores de robot
- Balas de lanzador
- Ruedas de robot
- Tarjetas de sensor de infrarrojos
- IC L293D
- IC Atmega8
- Abrazaderas de motor, interruptores, soportes de batería, baterías, componentes electrónicos pequeños, tornillos y tuercas, etc.
La lógica del seguidor de línea se puede dividir en dos segmentos (detección y control). Al principio, la lógica LFR observa el patrón de seguimiento que se encuentra más adelante. En la segunda fase, la lógica opera dos motores de accionamiento (izquierdo y derecho) según el estado de la pista informada. La tarjeta del sensor de infrarrojos contiene diodos emisores de luz infrarroja y fotodiodos infrarrojos.
El controlador de motor de dos canales es un simple chip controlador H-Bridge L293D. El cerebro del robot seguidor de línea es un microcontrolador Atmega8.

LFR-Ensamblaje mecánico
En primer lugar, coloque los motores, las abrazaderas y las ruedas como se ilustra aquí. A continuación, coloque dos balas de ruedas (delanteras y traseras) en la parte inferior del chasis. Finalmente, taladre los orificios adecuados en el chasis para que quepan todas las piezas restantes, como la placa de circuito terminada, las tarjetas de sensor, el soporte de la batería, los espaciadores de PCB, las abrazaderas de soporte, etc.

El soporte de la batería se puede colocar en la parte superior trasera del chasis, cerca de la bala del lanzador. La mejor ubicación para la placa de circuito principal es la parte superior central del chasis. Las tarjetas de sensor de infrarrojos (izquierda y derecha) deben instalarse en la parte frontal del chasis, en dirección hacia abajo, de modo que los componentes del sensor de infrarrojos (emisor y receptor de luz) puedan captar cómodamente la trayectoria inferior.

Toma nota, nuestro LFR sigue un camino con pista negra sobre superficie blanca. Para detectar la pista correctamente, los sensores infrarrojos deben colocarse en el chasis de tal manera que estén muy cerca del nivel de la pista. Asegúrese de que la distancia entre dos tarjetas de sensor de infrarrojos (izquierda y derecha) debe ser de 3 a 6 mm mayor que el ancho de la marca en la pista.

Lógica del sistema LFR
Como se describió anteriormente, nuestro LFR es un robot simple que seguirá una línea negra sobre un fondo blanco. Este LFR basado en chip AVR tiene una lógica muy simple, que se explica a continuación utilizando if-else en el pseudocódigo.
IF (el lado izquierdo del LFR está a punto de tocar el lado izquierdo de la pista)
Gire a la derecha;
ELSE IF (El lado derecho del LFR está a punto de tocar el lado derecho de la pista)
Gira a la izquierda;
DEMÁS
Avanzar;
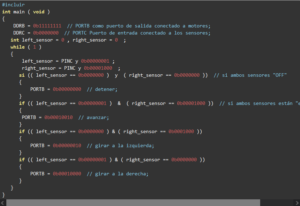
Si ambos sensores infrarrojos (izquierdo y derecho) están en la superficie blanca, el LFR se moverá hacia adelante, y si ambos sensores están en la superficie negra, el LFR se detendrá. Cuando el sensor izquierdo está en blanco y el sensor derecho en negro, el LFR girará a la derecha. De manera similar, cuando el sensor derecho está en blanco y el sensor izquierdo en negro, LFR girará a la izquierda. Estos cuatro casos son las únicas condiciones posibles para un robot seguidor de línea básico.
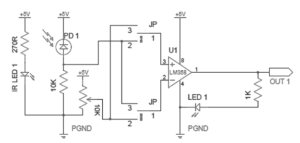
Diagrama del circuito de la tarjeta del sensor LFR-IR
Nuestro LFR tiene dos tarjetas de sensores de infrarrojos (izquierda y derecha) en la parte inferior del chasis para detectar el indicador de seguimiento negro en el camino. Cada tarjeta de sensor es una combinación de un LED infrarrojo, un fotodiodo infrarrojo y un chip comparador que funciona con un suministro de 5 V CC. El circuito comparador está cableado usando una parte (½) del LM358 IC.
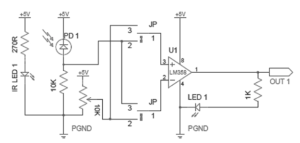
En la condición de puente predeterminada (JP: 1 + 2), la salida de la tarjeta del sensor de infrarrojos está en un estado lógico bajo (L), cuando detecta un color negro, y viceversa. Recuerde, necesitamos dos tarjetas de sensor de infrarrojos idénticas; uno para el lado izquierdo y otro para el lado derecho.
Ahora que la parte del ensamblaje mecánico ha terminado, y hemos completado la construcción de las tarjetas de sensor de infrarrojos izquierdo y derecho (L&R). Dado que la MCU (ATmega8) no puede accionar los motores de CC directamente, se utiliza un circuito controlador de motor dedicado. El circuito del controlador del motor aquí se basa en un simple IC de 16 pines (L293D) que puede impulsar dos motores de CC de forma independiente.
Diagrama del circuito del controlador del motor LFR
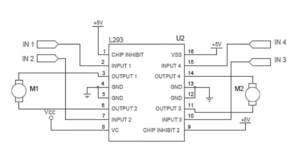
Como se puede ver en el diagrama del circuito, los pines 4, 5, 13 y 12 de LM293 (U2) están conectados a GND y el pin 16 (VSS) está conectado a 5V. Los pines de ‘inhibición de chip’ (1 y 9) actúan como los pines de habilitación para los pares de entrada y salida en el lado izquierdo y derecho del controlador del motor, respectivamente. El pin 8 (VC) recibe el suministro de entrada no regulado (Vcc) del circuito de suministro de energía del LFR. Es de destacar que este chip de controlador de motor es compatible con PWM, lo que significa que si aplica algún voltaje en el rango de 0 V a 5 V en cualquier entrada, se ampliará en un factor y estará disponible en la salida correspondiente.
Los cuatro pines de entrada (2-7-10-15) reciben instrucciones de accionamiento del motor de la MCU. En resumen, U2 actúa como la interfaz entre el microcontrolador (U3) y los motores de CC (M1 y M2) en el que las instrucciones del microcontrolador entran en sus pines de entrada y las salidas se utilizan para impulsar los motores del robot.
LFR-Microcon-
Diagrama de circuito de la unidad de troller (MCU)
Aquí está el circuito del MCU, conectado alrededor de nuestro chip ATmega8 favorito (U3). La primera tarea es resolver qué pines de la MCU se utilizarán para tomar entradas de las tarjetas de sensores de infrarrojos y dar salidas al circuito del controlador del motor. Como ejercicio, elegí PC0 (izquierda) y PC3 (derecha) del PUERTO C para las dos entradas de dos tarjetas de sensores de infrarrojos, y los pines PB1 a PB4 del PUERTO B como salidas al circuito del controlador del motor (en realidad, solo PB1 y PB4 son importante en este momento). El código está escrito utilizando el lenguaje C, por lo que debe sentirse cómodo con la sintaxis del lenguaje C, el concepto de bibliotecas, el compilador, etc. (el IDE utilizado es AVR Studio 4). El código final (código hexadecimal) se puede grabar en la MCU utilizando un programador adecuado (consulte los capítulos anteriores de este tutorial de AVR).
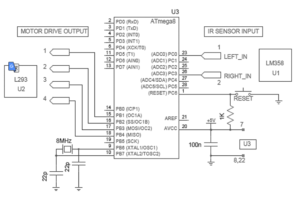
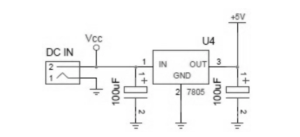
Diagrama del circuito de la fuente de alimentación LFR
Por lo general, el LFR se alimenta con un voltaje de suministro de batería de 9 a 12 V, mientras que la mayoría de los circuitos solo requieren 5 V. Puede usar de 6 a 8 pilas AA (o una batería de 9 V 6F22, no es buena para una larga duración) como banco de energía del LFR. El regulador de voltaje fijo LM7805 (U4) se usa en el circuito de suministro de energía para convertir el voltaje de suministro de entrada más alto (Vcc) a un valor más bajo (+ 5V) para hacer feliz al MCU. El LM7805 funciona incluso sin los condensadores de búfer, pero es mejor si se utilizan condensadores, ya que reducirán las fluctuaciones de voltaje. Agregar un condensador cerámico de 10 nF a través de cada terminal del motor de CC (+ / _) es otra buena práctica para suprimir el ruido no deseado generado por el motor.
Código de muestra