LEARN DESIGN OF AN X AND Y AXIS SYSTEM IN PLC PROGRAMMING IN LADDER LANGUAGE FOR BEGINNERS
Parte 1
El programa del PLC
El programa del PLC permite ejecutar 4 modos de operación de los ejes:
• Jogging: En este modo se pueden realizar operaciones de jogging de forma independiente para cada eje. Mientras el bit de avance o retroceso de uno de los ejes se mantenga a ON, el eje correspondiente avanzará o retrocederá a la velocidad establecida.
• Recorrido: En este modo se alternan los movimientos entre un eje y el otro (movimiento coordinado) para realizar un recorrido de serpentín. Tanto el ancho como el alto de los tramos del recorrido se pueden ajustar, así como el número de tramos. Cuando el bit de control de la ejecución se activa, se iniciará el recorrido a la velocidad y
aceleración/deceleración especificada para cada eje. Una vez llegue al final del recorrido ambos ejes retornaran al origen por interpolación lineal.
• Interpolación lineal: Este modo permite definir una tabla de puntos X e Y de hasta 2000 puntos y ejecutar el posicionado punto a punto por interpolación lineal de ambos ejes.
• Teaching: En este modo se permite la operación del modo manual para desplazarse a una posición deseada y posteriormente, mediante la activación de un bit guardar la posición actual en la tabla de puntos X e Y. Una vez guardados los puntos deseados, la activación de un bit ejecutará el posicionado punto a punto por interpolación lineal de ambos ejes.
Cada uno de estos modos corresponde a una sección del programa del PLC.
Además el programa dispone de una sección, Alarmas, que gestiona las operaciones a realizar en caso de
parada de emergencia, y otra sección, Inicio, que en el caso de que las comunicaciones con los Servo Drives y el SCADA estén activas bloquea los servomotores y permite ejecutar operaciones de búsqueda del origen, retorno al origen, bloqueo y desbloqueo de los servomotores.
A continuación se describen cada una de las secciones y se incluye el correspondiente programa
en lenguaje LADDER.
Inicio
En esta sección, hasta que las comunicaciones con el SCADA y con los Servo Drives no se han establecido, no se permite realizar las operaciones básicas (bloqueo/desbloqueo de los servos, búsqueda/retorno al origen) así como habilitar los indicadores de estado.
Para ello se utiliza la instrucción de enclavamiento Interlock, todas las salidas tipo relé que estén entre la instrucción de inicio de enclavamiento (IL) y la instrucción de final de enclavamiento (ILC) mantendrán su estado a OFF mientras la condición que ejecuta la instrucción de enclavamiento esté a OFF.
En el programa, la condición de ejecución del enclavamiento son las comunicaciones con el
SCADA y el Servo Drive. Cuando éstas no se encuentren activas, las salidas que permiten la
ejecución de las operaciones básicas antes mencionadas se mantendrán a OFF, así como los
indicadores de que los ejes están preparados, y por tanto no se permite la ejecución de ninguno
de los modos del programa.
Las siguientes líneas de programa muestran las condiciones para la ejecución del
enclavamiento/desenclavamiento.
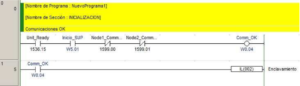
En la línea 0 de programa, el bit 1536.15 (Unit_Ready) indica si la unidad de control de posición esta lista, el bit W5.01 (Inicio_SUP) indica si se ha iniciado el SCADA y los bits 1599.00 y 1599.01 (Node1/2 Communications Error Flag) indican si se produce algún error en las comunicaciones con el Servo Drive 1 (Node 1) y el Servo Drive 2 (Node 2).
Cuando la unidad de control de posición esté lista, se haya iniciado el SCADA y no haya errores en las comunicaciones con los Servo Drives se activa la salida W0.04 (Comm_OK) que indica que las comunicaciones están activas. El bit W0.04 será la condición de ejecución de la instrucción Interlock, mientras éste se mantenga a ON las siguientes líneas de programa se ejecutaran normalmente, en caso contrario, todas las salidas que se muestran a continuación se mantendrán a OFF.
• Bloquear los servomotores
Cuando el Servo Drive 1 y el Servo Drive 2 están listos se activa un bit que habilita la ejecución del bloqueo de los Servomotores 1 y 2.
Las siguientes líneas de programa muestran las condiciones para la ejecución del bloqueo de los servomotores.
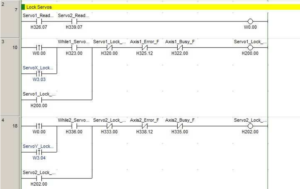
En la línea 2, los bits H326.07 y H339.07 (Servo1/2_Ready) indican si los Servo Drives 1 y 2 están preparados.
Cuando ambos Servo Drives están listos, se activa el bit W0.0, que habilita la ejecución de la operación de bloqueo de los servomotores.
De esta forma, cuando en el inicio del programa los Servo Drives estén listos, de forma automática se enviará la orden de bloqueo de los servomotores mediante la activación del bit W0.00.
En las líneas 3 y 4 se muestran las condiciones de ejecución de bloqueo de los servomotores.
Los bits H323.00 y H336.00 (While1/2_Servo_Unlocked) se mantienen a ON mientras los servomotores no están bloqueados, los bits H320.00 y H333.00 (Servo1/2_Lock_ACK_F) cambian su estado a ON cuando la orden de bloquear los servomotores es reconocida, los bits H325.12 y H338.12 (Axis1/2_Error_F) indican si se ha producido algún error en los ejes, los bits H322.00 y H335.00 indican si los ejes están ocupados realizando algún movimiento, los bits W3.03 y W3.04 envían la orden de bloqueo desde el SCADA, y los bits H200.00 y H202.00
activan la ejecución de bloqueo de los servomotores.
Cuando al inicio del programa o desde el SCADA se envía la orden de bloqueo de los servomotores (flanco ascendente), las salidas que activan la ejecución de bloqueo se mantendrán a ON mientras los servomotores no estén bloqueados, no se haya reconocido la orden debloqueo, y no hayan errores en los ejes ni estén ocupados.
• Desbloquear los servomotores
Las siguientes líneas de programa muestran las condiciones para la ejecución del desbloqueo de los servomotores.
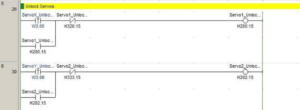
Los bits W3.05 y W306 (ServoX/Y_Unlock_SUP) dan la orden desde el SCADA de realizar el desbloqueo del servomotor correspondiente, los bits H320.15 y H333.15 (Servo1/2_Unlock_ACK_F) cambian su estado a ON cuando la orden de desbloquear los servomotores es reconocida y los bits H200.15 y H202.15 activan la ejecución de desbloqueo de los servomotores.
Por tanto, cuando desde el SCADA se envía la orden de desbloqueo de los servomotores (flanco ascendente), las salidas que activan la ejecución de desbloqueo se mantendrán a ON mientras no se haya reconocido la orden de desbloqueo.
• Búsqueda del Origen
Cuando desde el SCADA se manda la orden de búsqueda del origen, se ejecutara esta operación siempre y cuando se cumplan las condiciones que lo permiten.
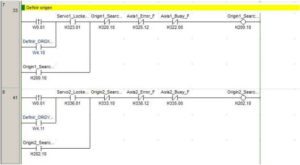
Los bits W4.10 y W4.11 envían la orden de definir el origen desde el SCADA, los bits H323.01 y H336.01 (Servo1/2_Locked_F) indican si los servomotores 1 y 2 están bloqueados, los bits H320.10 y H333.10 (Origin1/2_Search_ACK_F) cambian su estado a ON cuando la orden de búsqueda de origen es reconocida y los bits H200.10 y H202.10 (Origin1/2_Search_Bit) activan la ejecución de búsqueda del origen de los ejes 1 y 2.
Cuando desde el SCADA se manda la orden de búsqueda del origen de alguno de los 2 ejes (flanco ascendente), la salida que activa la ejecución de búsqueda del origen del correspondiente eje, se mantendrá a ON siempre y cuando el servomotor correspondiente esté bloqueado, y mientras no se haya reconocido la orden de búsqueda, no haya error en el eje ni esté ocupado.
• Retorno al origen
Cuando desde el SCADA o desde el programa se manda la orden de retorno al origen para alguno de los 2 ejes, se ejecutará esta operación siempre y cuando se cumplan las condiciones que lo permiten.
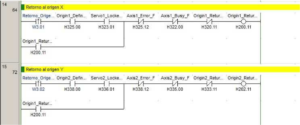
Los bits W3.01 y W3.02 envían la orden de retorno al origen desde el SCADA o el programa, los bits H325.00 H338.00 (Origin1/2_Defined) indican si el origen está definido en los ejes 1 y 2, los bits H320.11 y H333.11 (Origin1/2_Return_ACK_F) cambian su estado a ON cuando la orden de retorno al origen es reconocida y los bits H200.11 y H202.11 activan la ejecución de retorno al origen de los ejes 1 y 2.
Cuando desde el SCADA o el programa se manda la orden de retorno al origen para alguno de los 2 ejes (flanco ascendente), la salida que activa la ejecución de retorno al origen del correspondiente eje, se mantendrá a ON siempre y cuando el servomotor correspondiente esté bloqueado y se haya definido el origen del correspondiente eje, y mientras no se haya reconocido la orden de retorno, y no haya error en el eje ni esté ocupado.
• Indicadores de estado
Las siguientes líneas de programa muestran las condiciones que activan las salidas que indican que los ejes están listos para trabajar. También se muestran las condiciones que activan la salida que indica que ambos ejes se encuentran en el origen.

Cuando el servomotor del correspondiente eje esté bloqueado, el origen del eje esté definido y no esté ocupado, se activa la salida READY correspondiente.
Los bits H325.01 y H338.01 (Stoppped1/2_at_Origin) indican si el eje 1 y 2 se encuentran parados en el origen.
Cuando ambos bits se encuentren a ON, se activará la salida W2.00(En_Origen) para indicar que ambos ejes se encuentran parados en el origen.
Jogging
En esta sección se permite realizar operaciones de jogging de forma independiente para cada eje, a la velocidad y aceleración/deceleración previamente establecida en la configuración de la unidad de control de posición.
En el caso de la velocidad, mediante un bit se permite seleccionar entre velocidad 1 o 2. Para este proyecto el valor de velocidad 1 es de 20mm/s y el de velocidad 2 de 1mm/s por si nos interesa un ajuste más fino.
Siempre y cuando no se estén ejecutando otras operaciones, nos encontremos en el modo Manual o Teaching del SCADA y se permita desde los Servo Drives la realización de operaciones de jogging.
Para ello, todas las salidas que permiten operaciones de jogging en sentido directo o inverso para cada uno de los ejes se encuentran entre las instrucciones de inicio y fin de un enclavamiento.
Las siguientes líneas de programa muestran las condiciones para la ejecución del
enclavamiento/desenclavamiento.
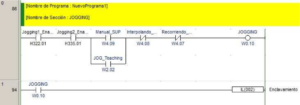
Los bits H322.01 y H335.01 (Jogging1/2_Enabled) indican si se pueden realizar operaciones de jogging, estos bits se pondrán a ON cuando los servomotores se encuentran bloqueados y permiten operaciones de jogging.
El bit W4.09 (Manual_SUP) indica si nos encontramos en el modo Manual del SCADA, y el bit W2.02 (JOG_Teaching) indica que nos encontramos en el modo Teaching del SCADA y que los ejes están listos para realizar operaciones de Teaching.
Los bits W1.15 y W4.08 indican si se está ejecutando el modo recorrido o el modo interpolación lineal.
Si los dos servomotores permiten realizar operaciones de jogging, nos encontramos en el modo manual o teaching del SCADA y no se está ejecutando ningún otro modo, se activará la salida W0.10 (JOGGING).
El bit W0.10 será la condición de ejecución de la instrucción Interlock, mientras éste se mantenga a ON las siguientes líneas de programa, que contienen las operaciones de jogging de ambos ejes, se ejecutaran normalmente, en caso contrario, todas las salidas que se muestran a continuación se mantendrán a OFF.
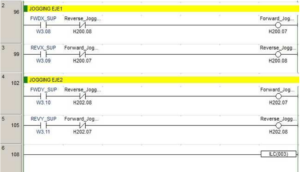
Los bits W3.08 y W3.10 (FWDX/Y_SUP) envían la orden desde el SCADA para realizar jogging en sentido directo en el eje X o el eje Y. Los bits W3.09 y W3.11 (REVX/Y_SUP) envían la orden desde el SCADA para realizar jogging en sentido inverso en el eje X o el eje Y.
Los bits H200.07 y H202.07 (Forward_Jogging1/2_Bit) ejecutan la operación de jogging en sentido directo en el eje X o el Y. Los bits H200.08 y H202.08 (Reverse_Jogging1/2_Bit) ejecutan la operación de jogging en sentido inverso en el eje X o el Y.
Mientras desde el SCADA se mantenga a ON uno de los bits de orden de jogging en un sentido para uno de los ejes, dicho eje se moverá en la dirección correspondiente a la velocidad seleccionada mediante el bit de selección H320.6 (Jogging Speed Selection), siempre y cuando no se esté realizando jogging en el sentido contrario.
Parte 1